|
Prodcuts Category
|
INplc 기술 정보 EtherCAT 통신 (CiA402)에 의한 서보 모터 제어 ■ 개요
■ 다운로드
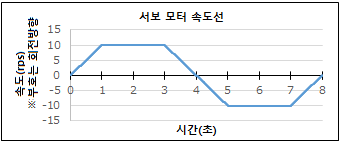
■ 서보모타의 제어방법
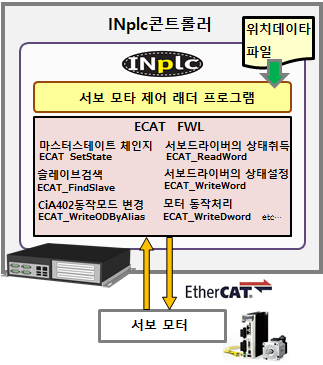
■ 모타 동작 제어 소스코드(발췌)
■ 래더프로그램의 유의점
|
|||||||||||||||||||||||||||||||||||||||||||







Copyright(C) 2000-2018 TPIKOREA Co. All Rights Reserved.
|
e-mail : support@tpikorea.com |
TPIKOREA 경기도 안양시 동안구 호계동 555-9 안양 국제유통단지 29동 208호
Tel : +82 31 501 8054 Fax : +82 455 8055