|




|
RSW-ECAT는 마치 I/O 포트에 직접 연결된 장치를 취급하는 것처럼 해서 다수의 EtherCAT 슬레이브 기기를 제어 할 수 있도록 배려되어 있습니다.
복잡한 EtherCAT 마스터 초기화 절차는 몇 개의 API 호출 완료하며 I/O 기능도 심플하게 디자인되어 있습니다.
EtherCAT의 전문 지식을 가지지 않고도 I/O 장치의 취급 경험이 있으면 즉시 제어 프로그래밍에 집중할 수있는 것이 RSW-ECAT-Master 특징입니다.
- RSW-ECAT의 기본적인 제어 절차
- RSW-ECAT는 기본적으로 다음 단계에 따라 슬레이브 기기의 제어를 실시합니다
- ① 마스터 초기화
- 응용 프로그램은 먼저 RSW-ECAT-Master와의 연결을 초기화합니다.
- ② 마스터를 OPERATIONAL 상태로 전환
- EtherCAT의 사이 클릭 통신을 시작합니다.
- ③ 제어 대상 슬레이브 검색
- EtherCAT 슬레이브는 비의 ID (VenderID와 ProductID)이 기록되어 있습니다.
이것을 키로 제어 대상 슬레이브의 존재와 위치를 검색 가져옵니다.
- ④ 마스터 사이클주기 대기
- 마스터 사이클을 맞이할 때까지 기다립니다.
- ⑤ 입출력 제어
- RSW-ECAT에 따라서 EtherCAT 슬레이브 I/O 정보는 연속 가상 주소 공간 (VIOS)에 재배치되어 있습니다. I/O 주소 공간을 처리하도록 EtherCAT 슬레이브 기기의 입출력을 제어하고 I/O 슬레이브로 부터 모션 슬레이브까지 다양한 EtherCAT 슬레이브 기기를 제어합니다.
| 초기화 |
WEhOpen () |
EtherCAT 통신 시작 |
| WEhClose () |
EtherCAT 통신 종료 |
| 마스터 제어 |
WEhRqState () |
마스터 상태 변경 |
| WEhGetState () |
마스터 스테이트 취득 |
| WEhWaitForCyclic () |
마스터 사이 클릭 처리의 대기 |
| 슬레이브 검색 / 관리 |
WEhFindSlave () |
슬레이브를 검색 |
| WEhGetSlaveStatus () |
슬레이브 상태 취득 |
| WEhGetOnlineSlaveCount () |
연결 슬레이브 수 취득 |
ProcessData
액세스 |
WEhReadByte () |
VIOS IN 영역에서 8비트 읽기 |
| WEhWriteByte () |
VIOS OUT 영역에 8비트 쓰기 |
| WEhReadWord () |
VIOS IN 영역에서 16비트 읽기 |
| WEhWriteWord () |
VIOS OUT 영역에 16비트 쓰기 |
| WEhReadDWord () |
VIOS IN 영역에서 32비트 읽기 |
| WEhWriteDWord () |
VIOS OUT 영역에 32비트 쓰기 |
| 버퍼링 |
WEhDAQ_StartIn () |
버퍼링 처리를 시작 |
| WEhDAQ_StopIn () |
버퍼링 처리를 중지 |
| WEhDAQ_ReadAi AI () |
버퍼링 데이터의 일괄 읽기 |
| WEhDAQ_ReadDi DI () |
버퍼링 데이터의 일괄 읽기 |
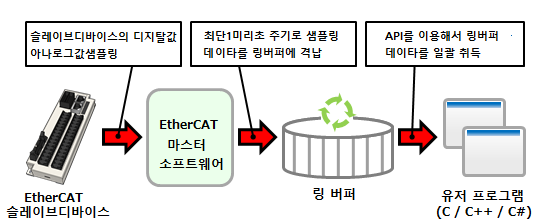
RSW-ECAT은 Windows와 병행 운영하면서 실시간 성을 견지하는 커널 기능이 포함되어 있습니다.
이 기능은 최소 1밀리 초 데이터 샘플링주기를 실현하고 있습니다. 샘플링 된 데이터는 링 버퍼에 저장되며, 사용자 응용 프로그램은 그들을 일괄 검색 할 수 있습니다.
| Visual Studio |
| 지원 버전 |
: |
2008,2010,2012,2013,2015 |
| 해당 개발 언어 |
: |
C, C ++ ,. Net Framework3.5 (C #, VB 등) |
|
※ EtherCAT®는 Beckhoff Automation GmbH, Germany의 등록 상표입니다.
|